自動駕駛高精地圖生成技術大揭秘
在自動駕駛技術飛速發展的今天,高精地圖作為車輛的“超級眼睛”和“記憶大腦”,已成為實現安全、高效自動駕駛不可或缺的核心基礎設施。它遠超傳統導航地圖的精度與信息維度,為自動駕駛系統提供了厘米級的道路模型、豐富的語義信息以及實時的動態更新能力。本文將深入揭秘計算機信息科技領域內,支撐高精地圖生成的關鍵技術。
一、高精地圖:自動駕駛的基石
高精地圖的核心特征在于“高精度”與“高豐富度”。其絕對坐標精度可達厘米級,不僅包含車道線、交通標志、路緣石等靜態道路元素的精確幾何與屬性信息,還集成了坡度、曲率、限高等對車輛控制至關重要的參數。它預先“記憶”了道路的精確樣貌,幫助自動駕駛車輛進行精準定位、路徑規劃與行為決策,尤其是在傳感器受天氣、光照或障礙物影響時,提供穩定的先驗知識支持。
二、核心技術棧:從數據采集到動態更新
高精地圖的生成是一個復雜的系統工程,融合了多種前沿計算機信息技術。
1. 多傳感器融合采集技術
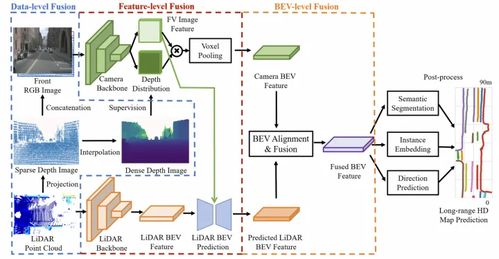
這是數據獲取的源頭。專業采集車通常配備激光雷達、攝像頭、高精度GNSS/IMU組合導航系統。激光雷達提供精確的三維點云數據,構建環境的骨骼框架;攝像頭捕捉豐富的紋理和顏色信息,用于識別交通標志、車道線類型等語義內容;GNSS/IMU則提供連續、高精度的位置與姿態信息,是所有數據時空對齊的基準。多源數據的同步與融合是確保原始數據質量的關鍵。
2. 點云處理與SLAM技術
海量的激光點云數據需要經過濾波、分割、分類等處理,以提取出道路、建筑物、桿狀物等要素。在GNSS信號缺失的區域(如隧道、城市峽谷),同步定位與地圖構建技術至關重要。SLAM算法能利用傳感器數據實時推斷采集車自身的位姿并同步構建局部地圖,確保地圖的連續性和精度。
3. 計算機視覺與深度學習
這是賦予地圖“理解”能力的技術。基于深度學習的圖像識別算法被廣泛應用于從攝像頭圖像中自動檢測和分類車道線、交通標志、信號燈、路牌文字等元素。語義分割網絡能將點云或圖像中的每個像素/點歸類到不同的語義類別,從而實現道路場景的自動化、精細化解析。
4. 眾源更新與云平臺技術
高精地圖的生命力在于“鮮度”。傳統專業采集更新成本高、周期長。如今,通過云平臺,可利用量產自動駕駛車輛或智能網聯汽車作為“移動傳感器”,持續回傳感知到的局部變化(如施工、臨時路障)。云平臺利用眾包數據融合、變化檢測算法,實現地圖要素的增量更新與快速發布,形成“采集-發布-使用-反饋”的閉環。
三、技術挑戰與未來展望
盡管技術日趨成熟,高精地圖的生成仍面臨挑戰:如何進一步提升自動化程度以降低制圖成本;如何處理海量眾包數據的一致性與可信度;如何實現不同圖商地圖數據的標準化與互通。
高精地圖技術將與車路協同、邊緣計算更深度結合。地圖本身可能進化為一個動態的、支持實時交互的“高精語義時空數據庫”,不僅描述靜態世界,更能融合來自路側單元、其他車輛的動態事件信息,為自動駕駛提供超越視距的感知能力,最終成為智慧交通系統的核心數字底座。
高精地圖生成技術是計算機視覺、人工智能、測繪科學、云計算等多學科交叉的璀璨結晶。它的持續進化,正悄然推動著自動駕駛乃至整個交通產業向著更安全、更智能的未來穩步前行。
如若轉載,請注明出處:http://www.essentialwm.com/product/34.html
更新時間:2026-02-14 09:02:37